オススメ商品

特長
■ASSISTAなら専門知識不要で簡単に立ち上げることが可能
三菱電機「協働ロボット ASSISTA」とは、誰でも(Anyone)、どこでも(Anywhere)、すぐに(Anytime)、簡単に導入できる協働ソリューション。
・アーム上部の操作ボタンで簡単操作
・専用エンジニアリングツールのコマンドブロックで簡単プログラミング
・多彩なアクセサリとケーブル1本で簡単接続
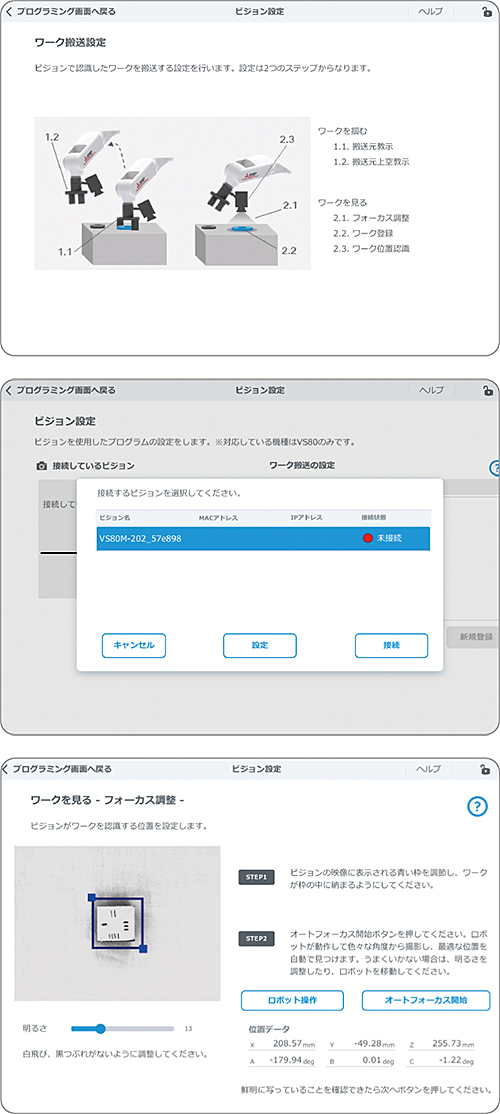
・専用エンジニアリングツールなら、二次元ビジョンセンサの設定もツール1つで可能
■アーム上部の操作ボタンで簡単操作
ASSISTAを簡単に動作指示できる操作ボタンをロボットアーム上部に装備。
ティーチングペンダントがなくても操作可能になります。
また、ロボットアーム部にLEDを装備し、ロボットの状態を一目で確認できます 。

■専用エンジニアリングツール RT VisualBox コマンドブロックで簡単プログラミング
ASSISTAは直感操作で、視覚的にプログラム作成ができます。
アームを直接手で動かして位置を記憶させる「ダイレクトティーチング」、コマンドブロックを画面のタッチ操作で選んでプログラムを作る「ビジュアルプログラミング」など、ロボットを初めて扱う方でも、すぐにロボットを動かすことができます。

■専用エンジニアリングツール RT VisualBoxひとつでビジョンセンサの設定も可能
RT VisualBoxでは、ビジョンセンサのフォーカス調整やワーク登録を画面にタッチするだけで、簡単に設定することができます。
ロボットとビジョンセンサを組みあわせた動作が、専門知識がなくてもすぐに作成できます。
■仕様
ASSISTA基本構成
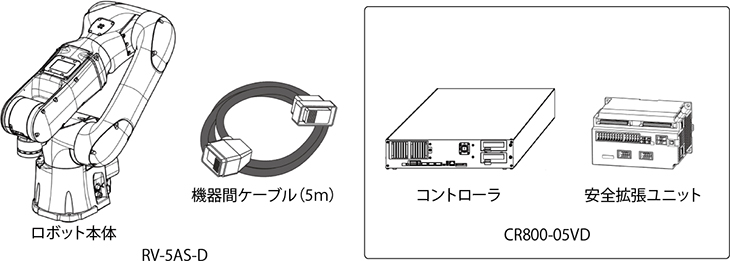
ロボット本体仕様(RV-5AS-D)
型式 単位 仕様値 環境仕様(保護等級) オイルミスト仕様(IP54)
特殊仕様 食品機械用グリース(H1グリース)対応
動作自由度 6
据付姿勢 床置・天吊り
構造 垂直多関節型
動作範囲 ウエスト(J1) 度
±240
ショルダ(J2) ±148
エルボ(J3) ±150
リストツイスト(J4) ±200
リストピッチ(J5) ±120
リストロール(J6) ±200
最大速度(注1) ウエスト(J1) 度/s
124(59.6)
ショルダ(J2) 124(34.0)
エルボ(J3) 124(34.0)
リストツイスト(J4) 297(142)
リストピッチ(J5) 356(215)
リストロール(J6) 360
最大リーチ径(P点) mm
910
最大合成速度(注2) 高速運転 mm/sec
1,000
協働運転(標準運転) 250
協働運転(低速運転) 50
可搬質量 定格 kg
5
最大(注3) 5.5
位置繰り返し精度 mm
±0.03
周囲温度(注4) ℃
0〜40
本体質量 kg
32
配線 ハンド入力/出力 −
メカニカルインタフェース部:2点/4点
フォアアーム部:6点/0点
ベース部:0点/4点力覚センサ用/予備線 −
5芯(24V、0.7A)として使用可能。うち1芯はFG専用線
LANケーブル −
カテゴリ5e対応
エアー配管 1次配管 −
⌀6×2本
2次配管 −
⌀4×4本(ベース部からエルボまで)
供給エア圧力 MPa
0.54
注1)()内の値は、入力電圧が単相AC100V-120V時の最大速度です。
注2)全軸合成時のロボットアーム各部での値です。安全機能により、表中に記載の速度に制限されます。協働運転時のロボットとの接触力については、実際の使用環境下での測定をお願いします。安全機能の詳細は、取扱説明書「協働ロボット機能と操作の詳細解説」の『速度監視機能(SLS)』を参照ください。
注3)最大可搬質量は、メカニカルインタフェース姿勢下向き(鉛直に対し土10°以内)の制限下での搭載可能質量です。
注4)ロボットの使用環境温度をパラメータOLTMXに設定してください。使用環境に合わせて、連続動作性能と過負荷保護機能が最適化されます。
コントローラ仕様(CR800-05VD)
項目 単位 仕様 備考 制御軸数 −
同時6軸
記憶容量 教示位置数 点
39,000
RT VisualBoxを使用した場合
プログラムブロック数:2000(ビジョン未使用時)、1800(ビジョン使用時)
プログラム本数:505(ビジョン未使用時)、500以下(注1)(ビジョン使用時)ステップ数 ステップ
78,000
プログラム本数 本
512
プログラミング言語 −
MELFA-BASIC VI
− 位置教示方式 −
ティーチング方式またはMDI方式
− 外部入出力 入出力 点
入力0点/出力0点
オプションで最大64/64まで拡張可能 専用入出力 −
汎用入出力に割付
“STOP”1点は固定 非常停止入力(注2) 点
1(2重化)
非常停止出力 点
1(2重化)
モードセレクタスイッチ入力(注3) 点
1(2重化)
モード出力 点
1(2重化)
ロボットエラー出力 点
1(2重化)
ドアスイッチ入力 点
1(2重化)
エンコーダ入力 チャンネル
2
− 安全入出力 点
8(2重化)/4(2重化)
安全拡張ユニット インタフェース 力覚インタフェース チャンネル
1
− リモートI/0 チャンネル
1
安全拡張ユニット接続専用 USB ポート
1
ver.2.0 High Speedデバイス機能のみ。USB mini-8 Ethernet ポート
1
ユーザ用:1000BASE-T/100BASE-TX/10BASE-T 1
T/B専用:100BASE-TX/10BASE-T オプションスロット スロット
2
オプションインタフェース取付用 SDメモリカードスロット スロット
1
拡張メモリ用 RS-422 ポート
1
T/B専用 電源 入力電圧範囲 V
単相AC100〜120
単相AC200〜230電源電圧変動率は10%以内となります 電源容量 kVA
1.0
突入電源含まず(注4) 電源周波数 Hz
50/60
− 外形寸法(足を含む) mm
430(W)×425(D)×99.5(H)
突起部を除く 質量 kg
約12.5
− 構造(保護等級) IP20
IP20 周囲温度(使用時) ℃
0〜40
凍結なきこと 周囲湿度(使用時) %RH
45〜85
結露なきこと 接地 Ω
100以下
D種接地(注5)
注1)登録するワークの品種数により、最大使用可能プログラム本数は異なります。
注2)Category 4、Performance Level e に対応しているのはSTO機能のみとなります。工場出荷時は、Category 3、Performance Level d に設定されています。Category 4、Performance Level e でご使用になる場合は、パラメータの設定が必要になります。
注3)コントローラのモード(MANUAL/AUTOMATIC)を選択するためのスイッチ(モードセレクタスイッチ)をお客様にてご準備ください。
注4)電源容量は推奨値です。なお、電源容量には、電源投入時の突入電流は含んでいませんのでご注意ください。電源容量は目安であり、動作の保証は入力電源電圧に影響されます。
注5)接地工事は、お客様にて実施ください。
安全拡張ユニット仕様(コントローラ付属品)
項目 仕様 備考 安全機能 STO機能 ロボット本体のモータへの駆動エネルギーを電気的に遮断する機能です IEC 60204-1 停止カテゴリ0相当
SS1機能 ロボットのモータ速度を制御して減速する機能、停止後はSTO状態になります IEC 60204-1 停止カテゴリ1相当
SS2機能 ロボットのモータ速度を制御して減速する機能、停止後はSOS状態になります IEC 60204-1 停止カテゴリ2相当
SOS機能 モータへの駆動エネルギーを遮断することなくロボットが停止していることを監視する機能です SOS、SLS、SLP、STRエラーの発生後、SS1に移行します。EN 61800-5-2準拠
SLS機能 ロボットアーム各部位が監視速度を超えないことを監視する機能です SLP機能 所定の監視位置が位置監視平面を超えないことを監視する機能です STR機能 ロボットの各モータのトルクが許容幅を超えないことを監視する機能です 安全性能 規格 EN ISO 10218-1:2011
ISO/TS 15066:2016
EN ISO 13849-1:2015
IEC 61800-5-1:2007
EN 61800-5-2:2017
EN 61000-6-7:2015
EN 61326-3-1:2017
IEC 61508-1:2010
IEC 61508-2:2010
IEC 61508-3:2010
EN 62061:2005/A2:2015
IEC 62061:2005/AMD1:2012/AMD2:2015− 性能 STO SIL2、カテゴリ3、PLd(出荷時設定)
SIL3、カテゴリ4、PLe(パラメータ設定変更時)− SS1、SOS、SS2、SLS、SLP、STR SIL2、カテゴリ3、PLd
− 危険側故障確率 STO PFH=1.40×10-8[1/h]
− SS1、SS2、SOS PFH=3.42×10-7[1/h]
− SLS PFH=3.42×10-7[1/h]
− SLP PFH=3.42×10-7[1/h]
− STR PFH=3.62×10-7[1/h]
− 安全拡張ユニット 電源仕様 電圧 DC24V ±5% リップル0.2V(P-P)
お客様にて準備 最大消費電力 300mA
− 構造(保護等級) IP20
− 質量 0.8kg
− 環境条件 周囲温度 0〜40℃
暖房器具などの熱源の近傍で使用しないこと 周囲湿度 45〜75%
入力信号 8系統(2重化信号)
出力信号 4系統(2重化信号)
■大電社で導入前のサポートを実施しています
導入前にお困りごとがあれば、シミュレーションや講習会など、大電社がサポートいたします。
・用途や目的に合わせたロボット 機種 のご提案
・ロボット設置位置の確認、ロボット姿勢の確認
・ロボット動作時間の確認
・ロボット実機 操作の体験
・プログラムミング講習
お問い合わせフォームより、お気軽にご相談ください。
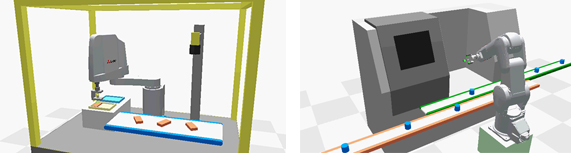
株式会社大電社作成サンプルシミュレーション 産業用ロボット MELFA
取扱メーカー/取扱製品

